smart_car
简单介绍智能车
- A类51循迹小车。
- B类有上位机如树莓派或者jeston nano这类板载来驱动底层下位机32或者51的小车,但实现功能还是以A类小车相似。
- C类 个人认为是真正意义上的智能车,包含上位机和下位机,上位机能够搭载如激光雷达,双目摄像头等外设,完成slam自主导航的功能。
简单介绍一下linux和ros及slam技术
ros
ros全称Robot Operating System,机器人操作系统,不是传统意义上的操作系统,像Linux、Windows、Android这类系统。
Linux
Linux 好用开放性高的操作系统,因为不是本文章重点,就不过多展开介绍。不是因为讲不清偷懒不讲了
slam
slam (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。具体的原理也不太熟就不展开讲述,以免误人子弟
unbuntu系统安装
网上相关文章一抓一大把,多装就会了,本文章还是更多以教会使用为主
shell和常用命令
shell是用户和Linux的一个桥梁
其中Ubuntu中的shell是bash
1 | sudo chmod +x name |
具体更多的运用还得深入学习
Ubuntu中安装和卸载应用
- 常规使用图形画界面安装和卸载东西,就不多介绍
- 主要强调使用apt来安装
1 | sudo apt update |
vim编译器
1 | vim name |
常用的就这些,感觉
简单介绍一下Linux文件管理
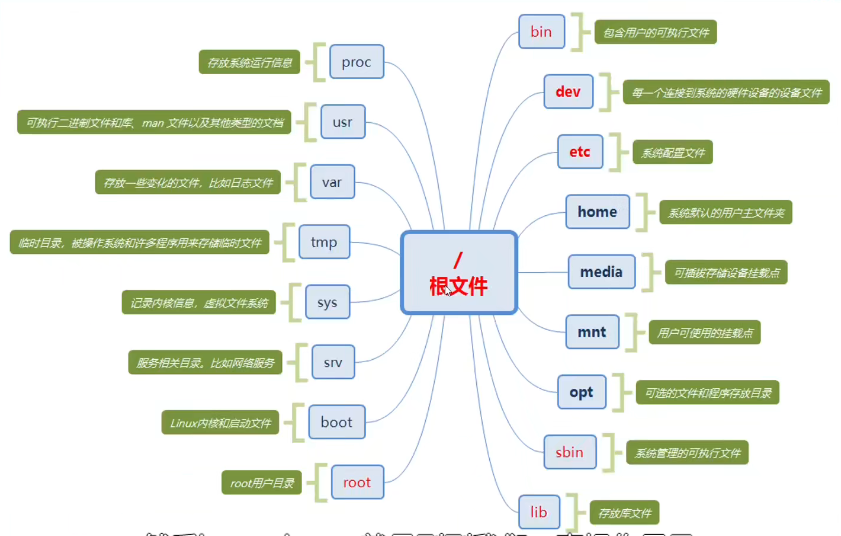
看图,最好背下来,背不下来就多看多记,然后就背下来了
文件权限
增添文件权限
1 | sudo chmod +x name |
Ubuntu下安装ros
不同Ubuntu需要安装不同版本的ros
可以进入到官方wiki下跟着安装步骤走
Wiki中文版wiki.ros.org
通信方式
话题、订阅、动作、参数
ros常用shell命令
1 | roscd turtlesim/ |
ros坐标系和tf变换

